无人机概念
无人机是通过无线电遥控设备或机载计算机程控系统进行操控的不载人飞行器无人机结构简单,使用成本低,不但能完成有人驾驭飞行执行的任务,更适用于有人飞机不宜执行的任务。在突发事情应急,预警有很大的作用。
无人机分类
按飞行方式无人机可以分为:旋翼无人机、扑翼无人机、固定翼无人机、飞艇等。


图 2-1 旋翼无人机 图 2-2 扑翼无人机

图 2-3 固定翼无人机
按高度分类
超低空无人机,低空无人机,中空无人机,高空无人机和超高空无人机。
超低空 0-100m
低空 100-1000m
中空 1000-7000m
高空 7000-18000
超高空 大于18000m
三、无人机应用

图 3-1 无人机应用
四、 无人机在测绘中的应用实例
1. 测区概况
测区处于山地丘陵地段,中间高、四周低,它的占地面积大、地形高低起伏、植被多样,海拔接近两千米。航测这片区域不仅仅是对无人机应对多变的环境和天气因素和工作人员操作遥感器技术的一项考验,更是对内业数据处理人员的一种挑战。
2. 外业数据采集

图 4-1 外业影像数据局部
2.1 地面控制点坐标采集
地面控制点坐标是完成测区影像进行空三处理的必要数据,精确的控制点坐标能够有效保证空三精度。按照测区的大小设计控制点。采集坐标时仪器的坐标系统与航测影像的坐标系统保持一致。
2.2 地面控制点影像采集
地面控制点影像是为了快速在测区影像中找到该控制点。地面控制点影像应该有一张近照和两张远照。控制点影像如图4-2所示。
图 4-2 控制点影像采集
2.3 测区影像采集
影像采集前的准备工作如下:
(1)规划飞行区域。
(2)选择合适的起飞降落场地。
(3)了解空域情况。
(4)飞行设备检查。
测区影像采集分为四个步骤:无人机安装、飞控软件连接设置、飞行采集、无人机回收。

图 4-3 Phantom4零部件

图 4-4 外业数据采集
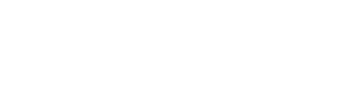
3.无人机内业数据处理
无人机测绘内业数据处理流程见下图。
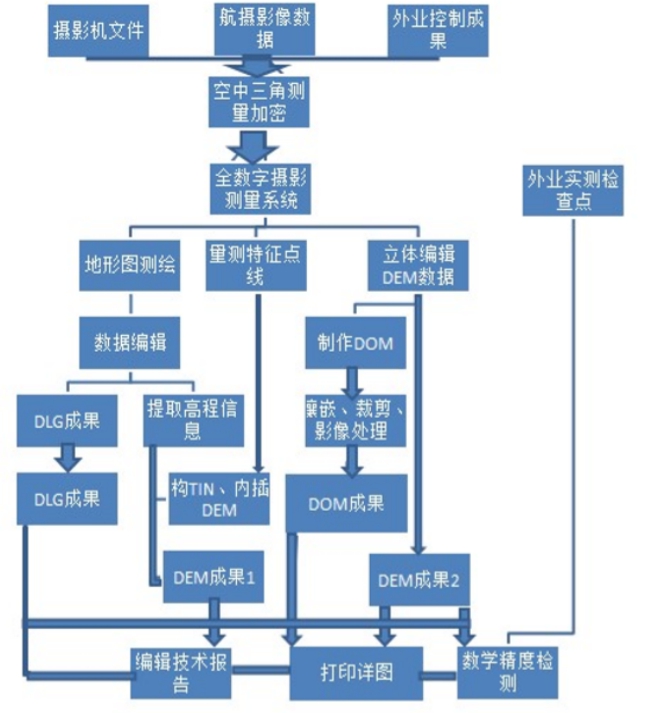
图 4-5 无人机内业处理流程

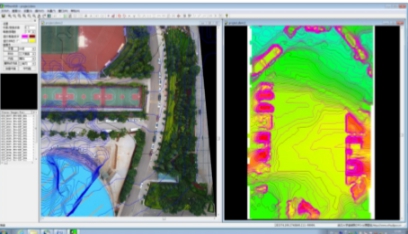
图 4-6 解析空中三角测量 图 4-7 DEM编辑

图4-8 DOM 拼接影像 图4-9 DLG制作